Tactile Hand Motion and Pose Guidance for 3D Interaction Inproceedings
Alexander Marquardt, Jens Maiero, Ernst Kruijff, Christina Trepkowski, Andrea Schwandt, André Hinkenjann, Johannes Schöning, Wolfgang Stuerzlinger
Abstract:
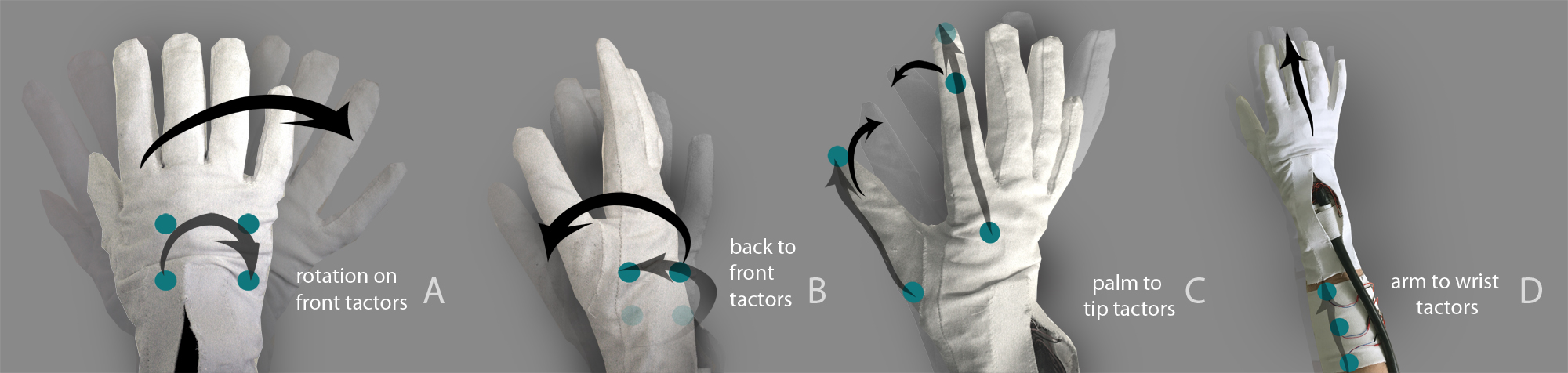
We present a novel forearm-and-glove tactile interface that can enhance 3D interaction by guiding hand motor planning and coordination. In particular, we aim to improve hand motion and pose actions related to selection and manipulation tasks. Through our user studies, we illustrate how tactile patterns can guide the user, by triggering hand pose and motion changes, for example to grasp (select) and manipulate (move) an object. We discuss the potential and limitations of the interface, and outline future work.
Date of publication:
Nov - 2018