Steering Through Sequential Linear Path Segments Inproceedings
Shota Yamanaka, Wolfgang Stuerzlinger, Homei Miyashita
Abstract:
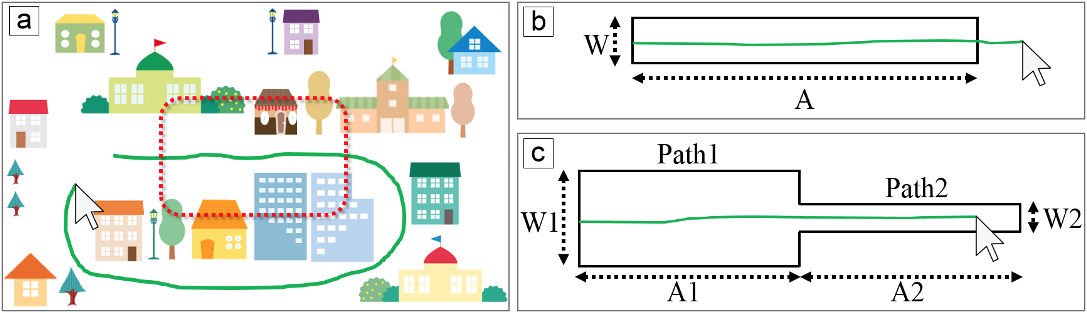
The steering law models human motor performance and has been verified to hold for a single linear and/or circular path. Some extensions investigated steering around corners. Yet, little is known about human performance in navigating joined linear paths, i.e., successions of path segments with different widths. Such operations appear in graphical user interface tasks, including lasso operations in illustration software. In this work, we conducted several experiments involving joined paths. The results show that users significantly changed their behavior, and that this strategy change can be predicted beforehand. A simple model summing the two indexes of difficulty (IDs) for each path predicts movement time well, but more sophisticated models were also evaluated. The best model in terms of both of R2 and AIC values includes the ID of the crossing operation to enter the second path.