A User-Friendly Accurate Bare-Handed Manipulation Technique for Distant Objects in Virtual Reality Misc
Di Bill Zhao, Wolfgang Stuerzlinger
Abstract:
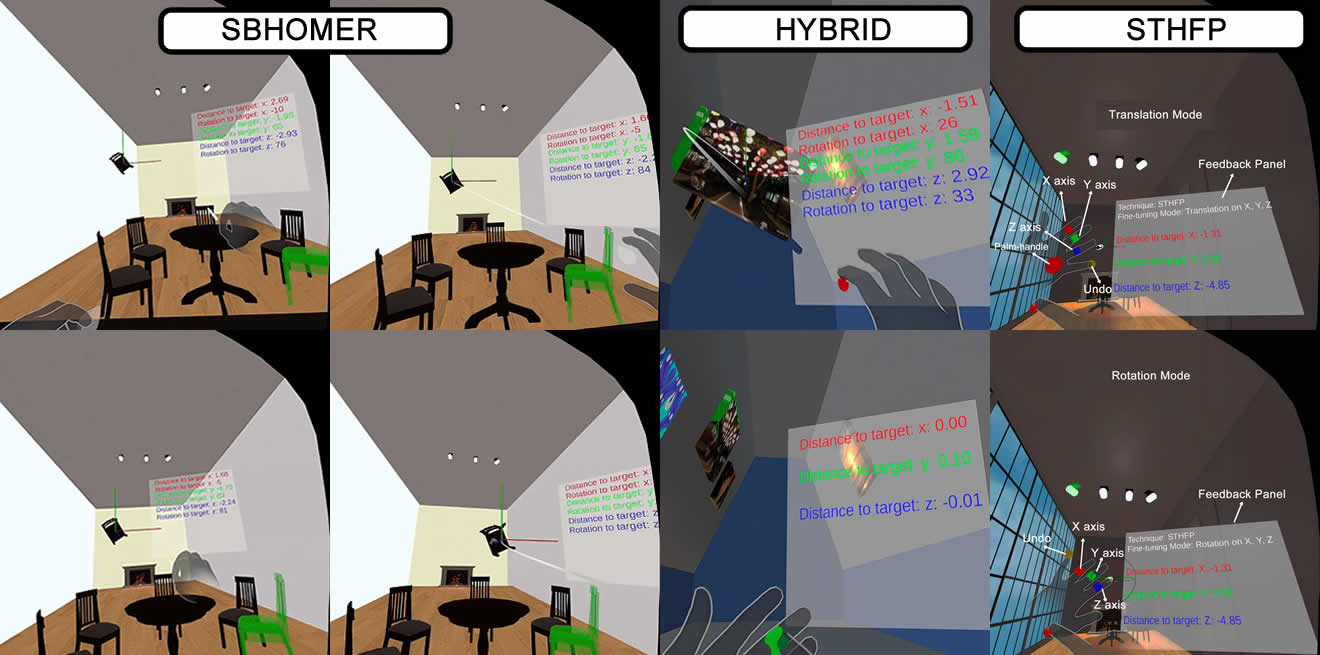
Bare-hand interaction is now common in virtual reality, but does not afford accurate manipulation of distant objects. Prior approaches rely on ray-casting, motion scaling, proxies, or near-field widgets, often trading precision for speed or increasing cognitive and physical demand. We present two bare-hand techniques for distant object manipulation: Scaled Two-Hand Finger-Palm (STHFP), which uses the non-dominant hand as a control surface for precise manipulation, and HYBRID, which combines fast ray-based positioning with two-handed refinement.
Results from our user study comparing STHFP and HYBRID against scaled bare-hand HOMER show that both new techniques significantly improve positional and rotational accuracy while reducing physical workload. While STHFP requires more interaction time, HYBRID achieves a balanced trade-off between speed and precision. Qualitative findings further reveal how constraint-based control and staged workflows shape user strategies and perceived effort. Together, our results demonstrate that leveraging the hand as a control surface can enable accurate, usable, and controller-free manipulation of distant objects in VR.