The Hedgehog: A Novel Optical Tracking Method for Spatially Immersive Displays Inproceedings
Andrew Vorozcovs, Andrew Hogue, Wolfgang Stuerzlinger
Abstract:
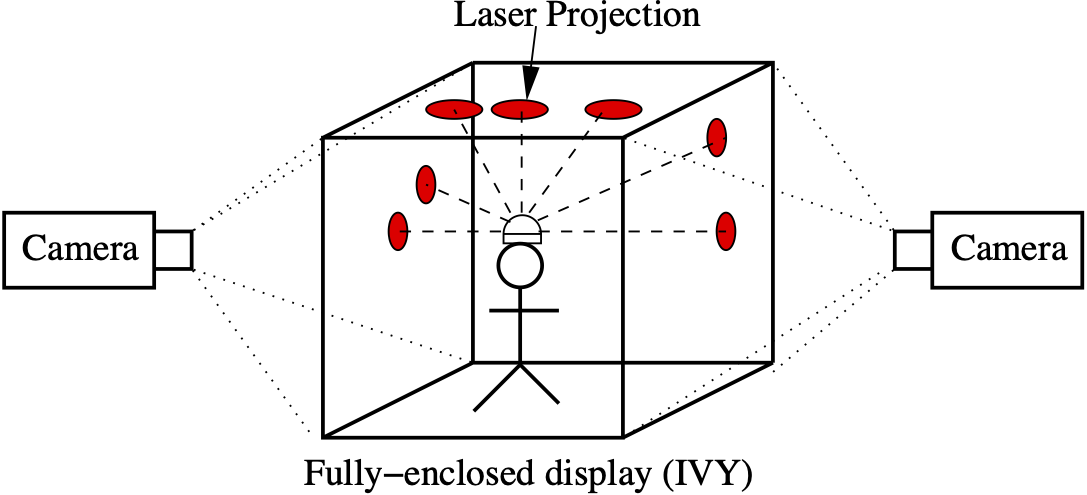
Existing commercial technologies do not adequately meet the requirements for tracking in fully-enclosed VR displays. We present the Hedgehog, which overcomes several limitations imposed by existing sensors and tracking technology. The tracking system robustly and reliably estimates the 6DOF pose of the device with high accuracy and a reasonable update rate. The system is composed of several cameras viewing the display walls and an arrangement of laser diodes secured to the user. The light emitted from the lasers projects onto the display walls and the 2D centroids of the projections are tracked to estimate the 6DOF pose of the device. The system is able to handle ambiguous laser projection configurations, static and dynamic occlusions of the lasers, and incorporates an intelligent laser activation control mechanism that determines which lasers are most likely to improve the pose estimate. The Hedgehog is also capable of performing auto-calibration of the necessary camera parameters through the use of the SCAAT algorithm. A preliminary evaluation reveals that the system has an angular resolution of 0.01 degrees RMS and a position resolution of 0.2 mm RMS.